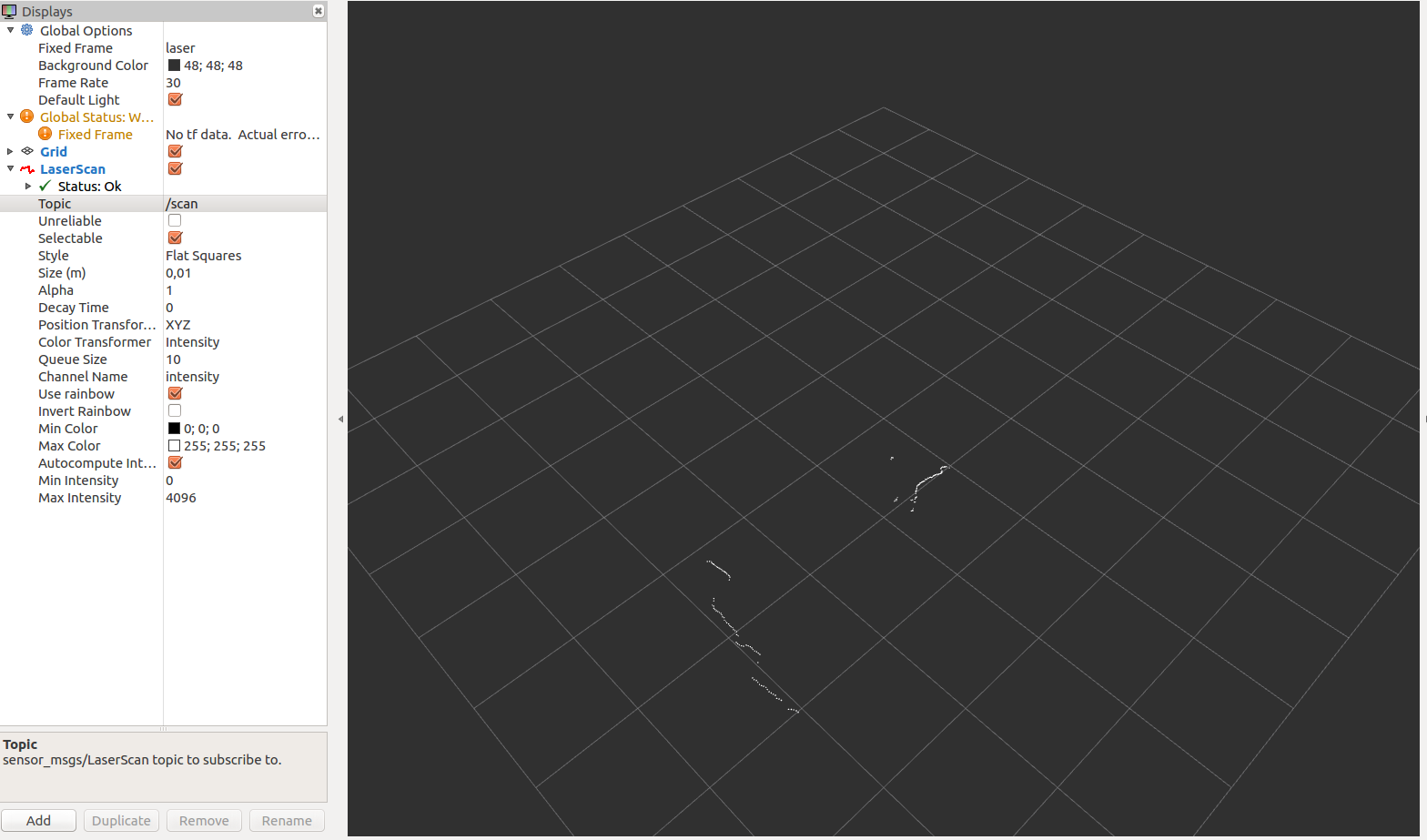
Utilizando a package hokuyo_node-indigo-devel foi possível realizar a leitura dos dados do laser. Por uma questão de facilidade numa fase inicial apenas um laser será usado, sendo o segundo laser adicionado numa fase posterior. A leitura do laser pode ser visualizada em RViz como se pode ver na figura a baixo.
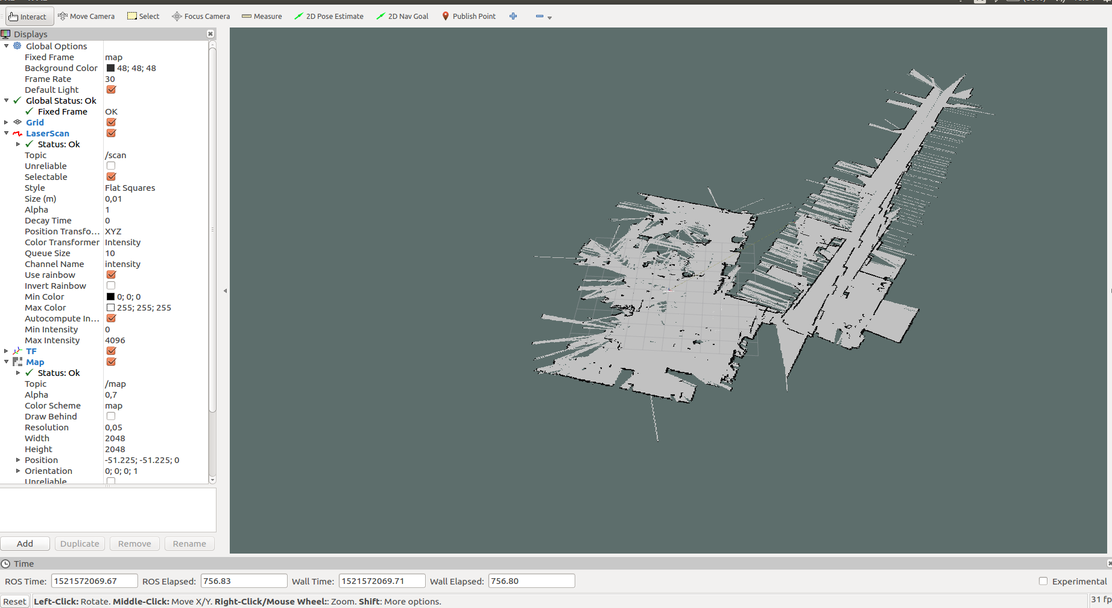
O Ector-Slam é uma package ROS que permite realizar o mapeamento usando laser. Foi implementado esta package o que permitiu realizar o mapa do lar e do corredor do 3º andar do DEM. A figura a baixo mostra os resultados.
Numa próxima fase deve ser implementado o segundo laser, o que implica uma calibração mais cuidada. Também é de relembrar que ainda há varias tarefas a realizar relativamente à odometria que foram referidas no post da semana passada.